This project was based off of a set of instructions that we were given. We built the machine according to the instructions and constructed a device to launch a ping-pong ball.
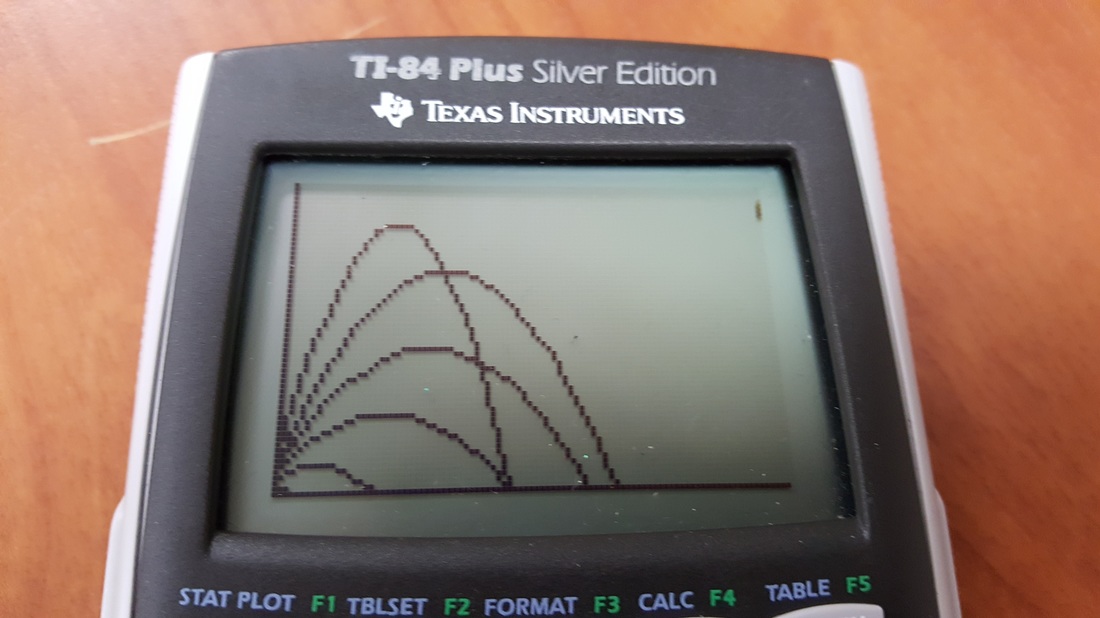
We then collected data from different launches (height, time, distance, angle) and created parametric equations to match the data. The equations we created were:
A) x=20cos(8.6°)t
y=-16t²+20sin(8.6°)t+1.5
B) x=47cos(17.46°)t
y=-16t²+47sin(17.46°)t+3
C) x=64.15cos(26.74°)t
y=-16t²+64.15sin(26.74°)t+4.5
D) x=69.167cos(36.87°)t
y=-16t²+69.167sin(36.87°)t+6
E) x=71.43cos(48.59°)t
y=-16t²+71.43sin(48.59°)t+7.5
F) x=66.18cos(64.16°)t
y=-16t²+66.18sin(64.16°)t+9
Below is a picture of the graph of the above parametrics. It shows the paths taken by the launched balls.


 RSS Feed
RSS Feed
