In this lab, we were given marbles of three different materials: wood, plastic, and metal. We were then challenged to sort the marbles by material using only materials contained in the VEX kit. Initially, we had intended to use a line follower to sort the marbles, which detects differences in color and light. The line follower proved too unreliable and difficult to work around, however, so we ended up just using physics.
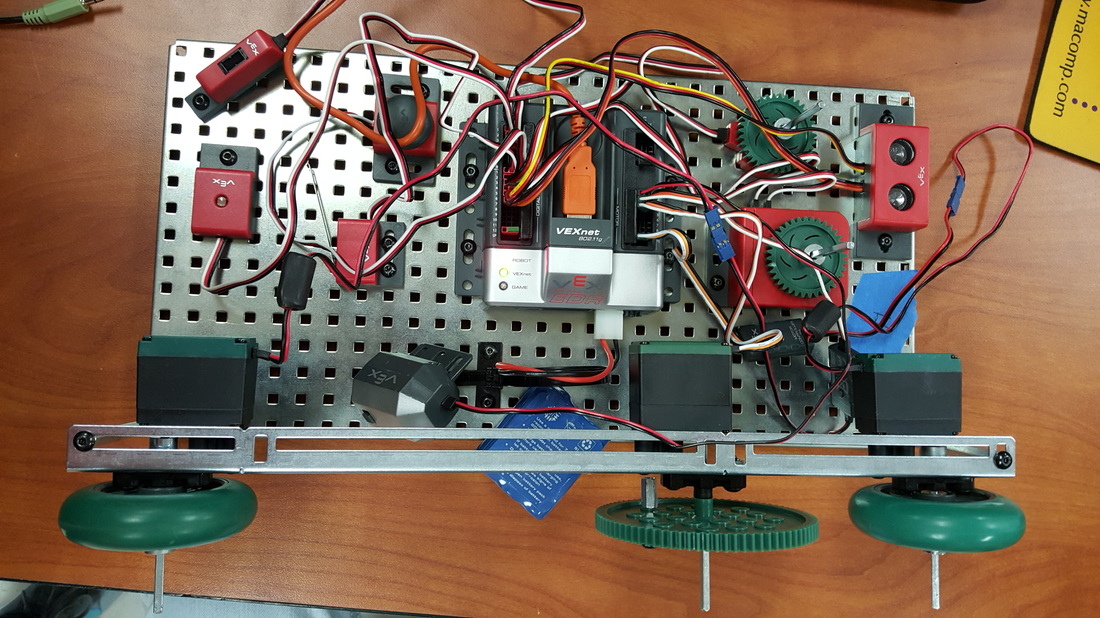
We used two motors: one to feed the marbles in and another to tilt the second ramp (first one from the left in the side view). Using a simple looped code, the feed would drop a marble. If it was metal, the weight would make it drop straight down into the first box from the right. The plastic and wood would continue moving on to the second ramp. The second ramp was set to tilt down to the right (based on the side view above) after a short period of time. The wood moved slower than the plastic, and so would be tipped back with the ramp, falling into the Chapstick container. The plastic would just blow through and fall into the large blue box on the end.


 RSS Feed
RSS Feed
